Analysis: Filter
Results Filtering allows to set the filters for each localization channel (e.g. G0 - Left) for visualization or export, therefore suitable for PALM/dSTORM/Tracking but not for Confocal/Widefield:
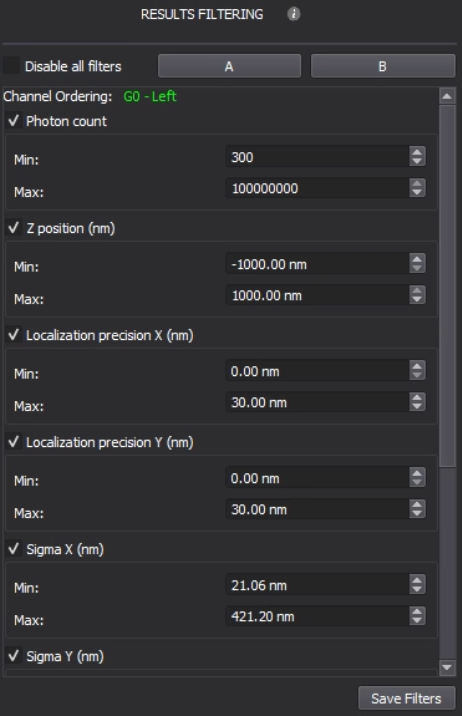
- Disable All Filters: enable/disable all the filters for visualization and export of the localizations. For batch processing, the same filter setting will be applied for all the selected datasets if enabled.
- A and B: allow to have 2 different configurations of filters, in which each localization channel has its own column of filters. Note that you can click near the name of the filter to show the corresponding histogram for each filter, in which the gray histogram represents the points that have been removed from the channels by all the filters:
- Filter - Photon Count: the absolute number of photons a pixel receives. A lower photon count means a worse localization precision and therefore should be removed. A minimum of 300 is a recommended starting point.
- Filter - Localization Precision (nm): the estimation of spatial uncertainty of a localization. A good localization would have a precision of 20~30 nm. Extremely small values (i.e. 5 nm) usually correspond to the fiducial markers or artifacts. A range of [5, 20~30] is a recommended starting point.
- Filter - Sigma (nm): the standard deviation of the point spread function (i.e. Gaussian) based upon the number of detected photons, the background intensity, and the pixel size of the camera. A sigma value smaller than 300 nm is acceptable and a sigma value smaller than 250 nm indicates a good localization. A range of [20, 250~300] is a recommended starting point.
- Filter - P-Value: the p-value used in a chi-squared test. It can be roughly interpreted as higher values (e.g. p > 0.99) mean more likely to be a valid Gaussian fit. Note that contradictorily a smaller value corresponds to a more reliable localization on CODI.
- Filter - Frame Index: the absolute order of the frames, which is defined by the light program and starts at 1. This filter is commonly used to remove emission-based channel crosstalking.
- Save Filters: save the current filter parameters for the upcoming acquisition for both A and B, otherwise, the filters are reset to default values for new acquisitions. Note that loading another dataset also reset the filter parameters if unsaved.
Related Articles
NimOS Analysis
NimOS provides functions for data analysis: Analysis: Tools Analysis: Viewing Options Analysis: Filter Analysis: Localizations Analysis: Drift CorrectionAnalysis: Viewing Options
Viewing Options allows selecting the channels and localizations of interest and customizing them for rendering and visualization: Color: set the rendering parameters for visualization of both the raw images and localizations: Raw Rendering (Per ...Analysis: Localizations
In Analyze, you can override some of the default parameters used for localization. For example, changing the sigma offers the possibility to localize a bigger object, such as versicles instead of molecules. To re-run the localization, you will need ...Analysis: Tools
The Tools module allows applying different advanced tools to analyze your data: Trace: show a time series of parameters for spots found in a circular area selected from the localization data (not applicable to the raw images). To draw a circular area ...Analysis: Drift Correction
A dSTORM acquisition is usually long and subject to drift (the image being slowly shifted to one direction) caused by, for example, temperature fluctuation. Drift Correction allows correcting for the drift as post-processing. There are two methods to ...